Investigadores rusos y sus colaboradores internacionales desarrollan una fotocélula bioelectrónica completamente funcional utilizando una molécula de una proteína fluorescente unida a un nanotubo de carbono.
Cuando se expone a la luz, el sistema puede cambiar sus propiedades electrónicas y funcionar emitiendo luz o como una célula de memoria, dependiendo de cómo se adjunte la proteína al tubo. Los hallazgos del equipo abren la puerta a nuevos elementos electrónicos, dispositivos de memoria y células solares ecológicos.
En láseres, diodos emisores de luz (LED) y algunos dispositivos de memoria se utilizan dispositivos optoelectrónicos capaces de almacenar y transmitir información respondiendo a varias longitudes de onda de luz. Son de particular interés los sistemas híbridos que contienen biomoléculas, como proteínas, junto con elementos electrónicos. Gracias a su bajo costo, seguridad ambiental y buen desempeño óptico, los sistemas híbridos pueden usarse como componentes en electrónica molecular, LED, láseres avanzados y transistores ópticos
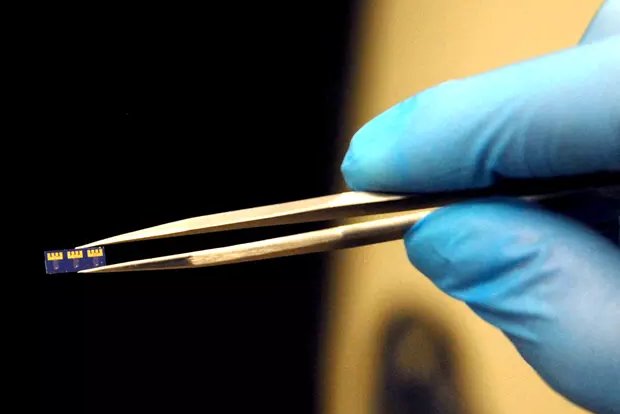
Microchip con un transistor bio-optoelectrónico
Investigadores del Instituto de Tecnología Electrónica de Moscú (MIET), el Instituto de Física Lebedev de RAS y el Instituto de Ciencia y Tecnología Skolkovo (Skoltech) en Moscú y sus colegas del Reino Unido, Finlandia y Serbia, modificaron nanotubos de carbono utilizando la proteína fluorescente verde (GFP).
«En la configuración examinada, un nanotubo de carbono de pared simple (SWCNT) funciona como un conductor activo y portador de una molécula de proteína, mientras que el grupo de fenilazida proporciona un entrecruzamiento covalente para los portadores de carga comunes entre los componentes del dispositivo», explica el profesor de Skoltech Albert Nasibulin, jefe del Laboratorio de Nanomateriales.
Al observar la estructura de los compuestos resultantes, el equipo descubrió que la proteína puede ayudar a controlar el tipo de elemento optoelectrónico que resultará. Dado que el sistema puede intercambiar energía y portadores de carga con el medio ambiente, los autores aprovecharon esta capacidad para construir nuevos nanodispositivos.
“El nanotubo de carbono es indispensable para las estructuras de sensores biomímicos, ya que ayuda a registrar hasta los más mínimos cambios en la estructura y la carga de las biomoléculas individuales a las que está vinculado”, comenta Nikita Nekrasov, estudiante de posgrado en MIET.
Los nanotubos de carbono tienen muchos electrones libres que pueden migrar a la proteína GFP y regresar a través del puente de fenilazida. Los investigadores probaron diferentes opciones de fijación de la GFP, colocando el cilindro en posición vertical o lateral, para ver cómo se comportaba la fotocélula. Descubrieron que si la proteína se colocaba de lado con su lado repelente al agua unido al tubo, todo el sistema se comportaba como un foco que controlaba la conductividad del tubo. Esto sucede porque encender y apagar la luz de excitación provoca un intenso intercambio de electrones entre el nanotubo y la proteína. En cambio, si se unía al tubo la parte de absorción de agua de la proteína, la carga quedaba atrapada entre el nanotubo y la proteína, lo que permitía que el dispositivo almacenara información durante docenas de minutos. A la vez, el elemento permaneció estable durante mucho tiempo gracias a la cubierta proteica protectora.
“Nuestros hallazgos ayudarán a crear dispositivos controlados por luz potentes y compactos para el almacenamiento y transmisión de información. Además, ambas partes de nuestros elementos son biodegradables y, por lo tanto, se pueden utilizar para crear células solares amigables con el medio ambiente”, señala Ivan Bobrinetsky, Doctor en Ciencias Técnicas, director de proyectos de subvenciones de RSF e investigador principal de MIET.
________________________________________
Artículo original: La investigación, que fue apoyada por una subvención de la Russian Science Foundation (RSF), se publicó en la revista Advanced Functional Materials, y robots-argentina.com.ar
Un equipo de científicos de la Universidad Nacional de Singapur (NUS) se inspiró en los invertebrados submarinos como las medusas para crear una piel electrónica con una funcionalidad similar.
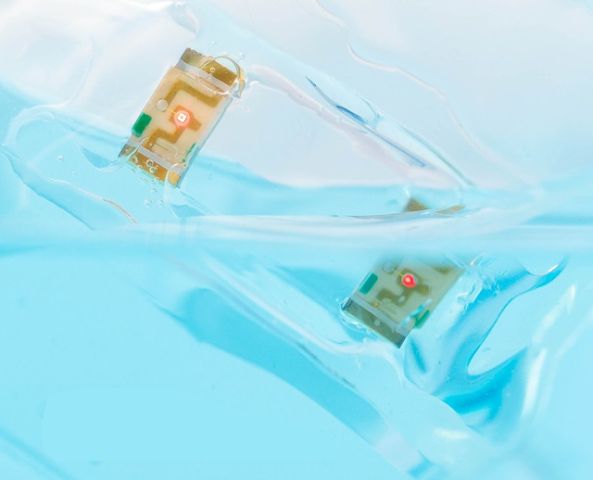
Al igual que una medusa, la piel electrónica es transparente, estirable, sensible al tacto y se auto-repara en entornos acuáticos. Pero además es conductora de la electricidad, y podría usarse en todo, desde pantallas táctiles resistentes al agua hasta robots acuáticos blandos.
El profesor asistente Benjamin Tee y su equipo del Departamento de Ciencia e Ingeniería de Materiales de la Facultad de Ingeniería de la Universidad Nacional de Singapur desarrollaron el material, junto con colaboradores de la Universidad de Tsinghua y la Universidad de California en Riverside.
El equipo de ocho investigadores dedicó poco más de un año a desarrollar el material, y su invención se publicó por primera vez este año en la revista Nature Electronics.
Materiales auto-reparables, transparentes e impermeables para un amplio rango de usos
El profesor asistente Tee ha estado trabajando en pieles electrónicas durante muchos años, y fue parte del equipo que desarrolló los primeros sensores electrónicos de piel con auto-reparación en 2012.
Su experiencia en esta área de investigación lo llevó a identificar los obstáculos clave que aún no han superado las pieles electrónicas auto-reparables. «Uno de los desafíos con la mayoría de los materiales auto-reparables actuales es que no son transparentes y no funcionan de manera eficiente cuando están mojados», dijo. «Estos inconvenientes los hacen menos útiles para aplicaciones electrónicas, como las pantallas táctiles, que a menudo deben usarse en condiciones de clima con humedad extrema».![]()
Continuó: «Con esta idea en mente, comenzamos a observar a las medusas; son transparentes y capaces de percibir en el ambiente acuático. Entonces, nos preguntamos cómo podríamos hacer un material artificial que pudiera imitar la naturaleza resistente al agua de las medusas y, sin embargo, fuese sensible al tacto».
Tuvieron éxito en este esfuerzo al crear un gel que consiste en un polímero a base de fluorocarbono con un líquido ionizado rico en flúor. Cuando se los combina, la red de polímeros interactúa con el líquido iónico a través de interacciones ión-dipolo altamente reversibles, lo que le permite auto-repararse.
Al elaborar las ventajas de esta configuración, el profesor Tee explicó: «La mayoría de los geles de polímeros conductores, como los hidrogeles, se hinchan al sumergirlos en agua o se secan con el tiempo en el aire, lo que hace que nuestro material sea diferente es que puede conservar su forma tanto en entornos húmedos como secos. Funciona bien en agua de mar e incluso en ambientes ácidos o alcalinos».
La próxima generación de robots blandos
La piel electrónica se crea imprimiendo el material nuevo dentro de circuitos electrónicos. Como es un material blando y estirable, sus propiedades eléctricas cambian cuando se toca, presiona o se tensa.
«Luego podemos medir este cambio y convertirlo en señales eléctricas legibles para crear una amplia gama de diferentes aplicaciones de sensores», agregó el profesor Tee.
«La capacidad de imprimir nuestro material en 3D también muestra potencial en la creación de tableros de circuitos totalmente transparentes que podrían usarse en aplicaciones robóticas. Esperamos que este material pueda usarse para desarrollar varias aplicaciones en tipos emergentes de robots blandos», agregó el profesor Tee, quien también pertenece al Departamento de Ingeniería Eléctrica e Informática de NUS, y el Instituto Biomédico para la Investigación y Tecnología de Salud Global (BIGHEART) en NUS.
Los robots blandos, y la electrónica blanda en general, buscan imitar los tejidos biológicos para hacerlos más compatibles mecánicamente con las interacciones hombre-máquina. Además de las aplicaciones de robots blandos convencionales, la tecnología impermeable de este nuevo material permite el diseño de robots anfibios y dispositivos electrónicos resistentes al agua.
Una ventaja adicional de esta piel electrónica autorreparable es el potencial que tiene para reducir la basura tecnológica. Tee explicó: «Cada año, se generan globalmente millones de toneladas de desechos electrónicos provenientes de teléfonos móviles, tabletas, etc. Esperamos crear un futuro en el que los dispositivos electrónicos hechos de materiales inteligentes puedan realizar acciones de reparación automática para reducir la cantidad de desechos electrónicos en el mundo».
Próximos pasos
El profesor Tee y su equipo continuarán su investigación y esperan explorar más posibilidades de este material en el futuro. Dijo: «Actualmente, estamos haciendo uso de las propiedades integrales del material para hacer nuevos dispositivos optoelectrónicos, que podrían utilizarse en muchas nuevas interfaces de comunicación hombre-máquina».
Fuente de la historia: ScienceDaily. Materiales proporcionados por la Universidad Nacional de Singapur. Referencia de la publicación: Yue Cao, Yu Jun Tan, Si Li, Wang Wei Lee, Hongchen Guo, Yongqing Cai, Chao Wang, Benjamin C.-K. Tee. Pieles electrónicas autocurables para ambientes acuáticos. Nature Electronics, 2019; 2 (2): 75 DOI: 10.1038 / s41928-019-0206-5
Como material genético, el ADN es responsable de toda la vida conocida. Pero el ADN también es un polímero. Aprovechando la naturaleza única de la molécula, los ingenieros de Cornell han creado máquinas simples construidas con biomateriales con propiedades de seres vivos.

Con el uso de lo que denominan materiales DASH (DNA-based Assembly and Synthesis of Hierarchical materials, Ensamblaje y Síntesis de Jerarquías a base de ADN), los ingenieros de Cornell construyeron un material de ADN con capacidades de metabolismo, además del autoensamblaje y la organización, tres características clave de la vida.
“Estamos introduciendo un concepto de material completamente nuevo y realista impulsado por su propio metabolismo artificial”. «No estamos haciendo algo que está vivo, pero estamos creando materiales que son mucho más reales que nunca se han visto antes», dijo Dan Luo, profesor de ingeniería biológica y ambiental en la Facultad de Agricultura y Ciencias de la Vida.
El artículo es «Material de ADN dinámico con comportamiento de locomoción emergente impulsado por el metabolismo artificial» (Dynamic DNA material with emergent locomotion behavior powered by artificial metabolism), publicado el 10 de abril en Science Robotics.
Para que cualquier organismo vivo se mantenga, debe haber un sistema para gestionar el cambio. Se deben generar nuevas células; Las células viejas y los desechos deben ser barridos. La biosíntesis y la biodegradación son elementos clave de la autosostenibilidad y requieren metabolismo para mantener su forma y funciones.
A través de este sistema, las moléculas de ADN se sintetizan y ensamblan en patrones de manera jerárquica, lo que resulta en algo que puede perpetuar un proceso dinámico y autónomo de crecimiento y decadencia.
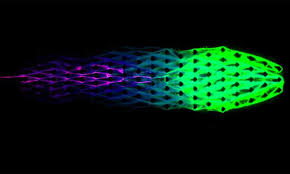
Usando DASH, los ingenieros de Cornell crearon un biomaterial que puede emerger de forma autónoma de sus bloques de construcción a nanoescala y organizarse por sí mismo, primero en polímeros y finalmente en formas de mesoescala (componentes en un rango de aproximadamente 0,1 mm a 5 mm). Partiendo de una secuencia de semillas de 55 nucleótidos, las moléculas de ADN se multiplicaron cientos de miles de veces, creando cadenas de ADN de repetición de unos pocos milímetros de tamaño. La solución de reacción se inyectó luego en un dispositivo microfluídico que proporcionaba un flujo de energía líquida y los componentes básicos necesarios para la biosíntesis.
A medida que el flujo invadía el material, el ADN sintetizaba sus propias nuevas hebras, con el extremo frontal del material creciendo y el extremo de la cola degradándose en un equilibrio optimizado. De esta manera, hizo su propia locomoción, avanzando lentamente, contra el flujo, de manera similar a como se mueve el moho mucilaginoso.
La habilidad de locomoción permitió a los investigadores enfrentar grupos del material entre sí en carreras competitivas. Debido a la aleatoriedad en el entorno, un cuerpo eventualmente obtendría una ventaja sobre el otro, permitiendo que uno cruzara primero una línea de meta.
“Los diseños siguen siendo primitivos, pero mostraron una nueva ruta para crear máquinas dinámicas a partir de biomoléculas. Estamos en un primer paso en la construcción de robots reales mediante el metabolismo artificial”, dijo Shogo Hamada, profesor e investigador asociado en el laboratorio de Luo, y autor principal y coautor del artículo. “Incluso a partir de un diseño simple, pudimos crear comportamientos sofisticados como las competencias. El metabolismo artificial podría abrir una nueva frontera en robótica».
Actualmente, los ingenieros están explorando formas para que el material reconozca los estímulos y puedan buscarlos de manera autónoma en el caso de la luz o los alimentos, o evitarlos si son dañinos.
El metabolismo programado incrustado en los materiales de ADN es la innovación clave. El ADN contiene el conjunto de instrucciones para el metabolismo y la regeneración autónoma. Después de eso, es por su cuenta.
“Todo, desde su capacidad para moverse y competir, todos esos procesos son independientes. No hay interferencia externa «, dijo Luo. “La vida comenzó miles de millones de años a partir de unos pocos tipos de moléculas. Esto podría ser lo mismo».
El material que el equipo creó puede durar dos ciclos de síntesis y degradación antes de que caduque. Según los investigadores, es probable que la longevidad se extienda, lo que abre la posibilidad de más «generaciones» de material a medida que se auto-replica. «En última instancia, el sistema puede llevar a máquinas auto-reproductivas realistas», dijo Hamada.
«Más emocionante, el uso del ADN le da a todo el sistema una posibilidad de auto-evolución», dijo Luo. «Eso es enorme».
Teóricamente, podría diseñarse para que las generaciones subsiguientes surjan en segundos. Según Luo, la reproducción a este ritmo acelerado aprovecharía las propiedades de mutación naturales del ADN y aceleraría el proceso evolutivo.
En el futuro, el sistema podría usarse como un biosensor para detectar la presencia de cualquier ADN y ARN. El concepto también podría usarse para crear una plantilla dinámica para hacer proteínas sin células vivas.
El trabajo fue financiado en parte por la National Science Foundation y apoyado por el Fondo de Ciencia y Tecnología de NanoEscala de Cornell y el Instituto Kavli en Cornell for Nanoscale Science. Entre los colaboradores se encuentran Jenny Sabin, la profesora de Arquitectura Arthur L. e Isabel B. Wiesenberger, y los investigadores forman la Universidad Jiaotong de Shanghai y la Academia China de Ciencias.
Hay una patente pendiente en el Centro de Licencias de Tecnología.
El sistema de senseo del dispositivo fue inspirado por la forma en que las cucarachas se mueven a lo largo de los túneles.
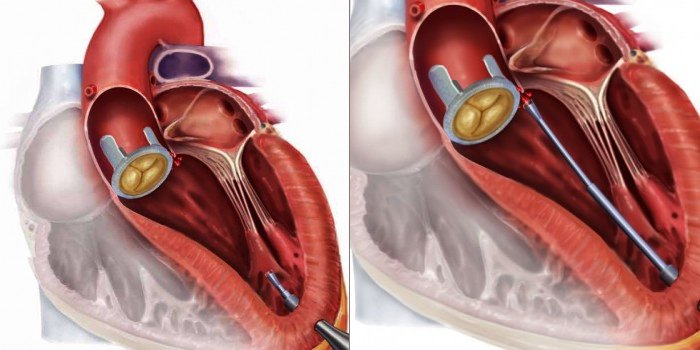
Operar dentro de un corazón que late es un procedimiento complejo y delicado que requiere cirujanos expertos. El personal médico generalmente utiliza joysticks de control y una combinación de rayos X o ultrasonido para guiar con cuidado los catéteres a través del cuerpo.
Ahora, por primera vez, un catéter robótico ha sido capaz de navegar de forma autónoma dentro de un corazón para ayudar a llevar a cabo un procedimiento particularmente complejo. El dispositivo, que se inspiró en la forma en que ciertos animales aprenden sobre su entorno, se utilizó para ayudar a los cirujanos a cerrar las hemorragias en los corazones de cinco cerdos vivos.

«Las ratas usan bigotes para palpar a lo largo de la pared, los humanos sienten su camino y las cucarachas usan sus antenas», dice Pierre Dupont en la Escuela de Medicina de Harvard, quien dirigió el nuevo estudio publicado en Science Robotics. «Del mismo modo, este dispositivo usa sensores táctiles para elabora dónde está, y dónde ir a continuación, basado en un mapa del corazón «.
El dispositivo tiene 8 mm de ancho, con una cámara y una luz LED en su extremo que funciona como un sensor óptico y táctil combinado. Se usó un algoritmo de aprendizaje automático que se entrenó en alrededor de 2000 imágenes de tejido cardíaco para guiarlo a medida que se movía. El sensor táctil palpa periódicamente el tejido del corazón mientras se mueve, lo que ayuda a saber dónde está y asegurándose de no dañar el tejido.
Durante el experimento, el catéter navegó a la ubicación correcta el 95% del tiempo de los 83 ensayos en cinco cerdos. Esta es una tasa de éxito similar a la de un clínico con experiencia, y el procedimiento no dejó hematomas ni daños en los tejidos, según el equipo de investigación. Una vez en posición, los cirujanos tomaron el control y llevaron a cabo el procedimiento para reparar la hemorragia. Aunque han estado disponibles catéteres robóticos durante algunos años, este es el primero que ha podido encontrar su camino sin ayuda humana.
La idea es que, un día, esa tecnología podría liberar a los cirujanos para concentrarse en otras tareas o ayudar al personal médico menos experimentado a realizar procedimientos más complejos. La tecnología podría ser reutilizada para su uso en humanos dentro de cinco años, dice Dupont.
Artículo original:
Technology Review
Science Robotics
En una reciente y deslumbrante mañana en California (EE.UU.), la investigadora del MIT Vivienne Sze subió a un pequeño escenario para realizar la que quizá haya sido presentación más desconcertante de su carrera. Dominaba el tema a la perfección. Debía hablar sobre los chips que se desarrollan en su laboratorio y de cómo iban a acercar el poder de la inteligencia artificial (IA) a una multitud de dispositivos con una potencia limitada sin tener que depender de los enormes centros de datos donde se realizan la mayoría de los cálculos de IA. Pero, tanto lo que vio en la conferencia como el público que acudió la hicieron reflexionar.

Hablamos de MARS, una conferencia de élite, solo para invitados, en la que los robots pasean (o vuelan) por un resort de lujo, mezclándose con famosos científicos y autores de ciencia ficción. Solo unos pocos investigadores fueron invitados a dar charlas técnicas, y las sesiones tienden a ser tanto inspiradoras como esclarecedoras. El público estaba compuesto por unos 100 investigadores, directores ejecutivos y algunos de los empresarios más importantes del mundo. El maestro de ceremonias de MARS fue el fundador y presidente de Amazon, Jeff Bezos, que estaba sentado en la primera fila. «Se podría decir que era un público de muy alto nivel», recuerda Sze con una sonrisa.

Otros ponentes de MARS presentaron robots que cortan al estilo kárate, drones que aletean como si fueran grandes insectos extrañamente silenciosos, e incluso proyectos para crear colonias marcianas. Ante esta competencia, los chips de Sze podían parecer más modestos. A simple vista, no se distinguen de los chips que hay dentro de cualquier dispositivo electrónico. Sin embargo, sus microprocesadores eran indudablemente mucho más importantes que cualquier otra cosa que hubo en la conferencia.
Nuevas capacidades
Los nuevos diseños de chips, como los que se desarrollan en el laboratorio de Sze, pueden ser cruciales para el futuro progreso de la IA, y los drones y robots que se dejaron ver en MARS. Hasta ahora, el software de IA se ejecutaba principalmente en unidades de procesamiento gráfico (GPU, por sus siglas en inglés), pero los nuevos diseños especializados de hardware podrían lograr que los algoritmos de IA sean más potentes, lo que abriría el camino a unas nuevas aplicaciones. Los nuevos chips de inteligencia artificial podrían masificar los robots de almacén y permitir que los teléfonos inteligentes crean escenarios fotorrealistas de realidad aumentada.
Los diseños de los chips de Sze son muy eficientes y flexibles, algo crucial para un campo que evoluciona tan rápido como la IA (ver ¿Quién ganará la batalla de los chips si el sector de la IA no para de cambiar?). En concreto, están diseñados para exprimir aún más potencial de los algoritmos de aprendizaje profundo que ya han revolucionado el mundo. Este proceso incluso podría lograr que este tipo de programas evolucionen por sí solos. Sze detalla: «Dado que la ley de Moore se ha ralentizado, necesitamos un nuevo hardware».
Esta ley choca cada vez más con los límites físicos de los componentes de ingeniería a escala atómica. Y está despertando un creciente interés en arquitecturas alternativas y nuevos enfoques de computación.
Este interés ha llegado incluso al Gobierno de EE. UU., que además de mantener su liderazgo en el diseño de chips en general, confía en los microprocesadores especializados para arrebatarle a China el trono de la IA. De hecho, los propios chips de Sze se están creando gracias a fondos de un programa de DARPA destinado a ayudar a desarrollar nuevos diseños de chips de IA (ver Así es la estrategia de EE.UU. para quitarle a China el trono de la IA).
Pero el impulso en la innovación de la fabricación de chips procede principalmente del aprendizaje profundo, una técnica muy poderosa de enseñar a las máquinas a realizar tareas útiles. En vez de dar a un ordenador un conjunto de reglas a seguir, una máquina se programa a sí misma básicamente. Los datos de entrenamiento se introducen en una gran red neuronal artificial simulada, que luego se ajusta para que produzca el resultado deseado. Con suficiente entrenamiento, un sistema de aprendizaje profundo puede encontrar patrones sutiles y abstractos en los datos. La técnica se aplica a una creciente variedad de tareas prácticas, desde el reconocimiento facial en los teléfonos inteligentes hasta la predicción de enfermedades a partir de imágenes médicas.
La carrera de los chips de IA
El aprendizaje profundo no depende tanto de la ley de Moore. Las redes neuronales ejecutan muchos cálculos matemáticos en paralelo, un enfoque para el que los GPU de videojuegos resultan mucho más efectivos dado que realizan computación paralela para renderizar imágenes en 3D. Pero los microchips diseñados específicamente para el aprendizaje profundo deberían ser aún más potentes.
El potencial de las nuevas arquitecturas de chips para mejorar la inteligencia artificial ha impulsado la actividad empresarial a un nivel que la industria de los chips no ha visto en décadas (ver La nueva carrera de los chips de silicio se libra en el cuadrilátero de la inteligencia artificial y China da la vuelta al marcador de los chips gracias a la IA). Las grandes empresas tecnológicas que quieren aprovechar y comercializar la inteligencia artificial, como Google, Microsoft y (sí) Amazon, están trabajando en sus propios chips de aprendizaje profundo. Pero también hay muchas start-ups trabajando en este campo. De hecho, el analista de microchips en la empresa de analistas Linley Group Mike Delmer considera que «es imposible hacer un seguimiento de todas las compañías que están apareciendo en el espacio del chip de IA». Y añade: «No bromeo cuando digo que descubrimos un nuevo chip casi cada semana«.
La verdadera oportunidad, según Sze, no reside en construir los chips de aprendizaje profundo más poderosos. La eficiencia energética también es importante porque la IA también debe funcionar más allá de los grandes centros de datos, lo que significa que los microprocesadores deberían ser capaces de funcionar con la energía disponible en el dispositivo. Esto se conoce como operar «al límite».
«La IA estará en todas partes, así que es importante encontrar formas de aumentar la eficiencia energética«, afirma el vicepresidente del grupo de productos de inteligencia artificial de Intel, Naveen Rao. Por ejemplo, el hardware de Sze es más eficiente, en parte, porque reduce físicamente el atasco entre el lugar en el que almacenan los datos y aquel en el que se analizan, pero también porque utiliza esquemas inteligentes para reutilizar los datos. Antes de unirse al MIT, Sze fue pionera en este enfoque para mejorar la eficiencia de la compresión de vídeo en Texas Instruments.
En un campo que avanza tan rápido, como es el aprendizaje profundo, el desafío para aquellos que trabajan con chips de IA consiste en asegurarse de que sean lo suficientemente flexibles para adaptarse a cualquier aplicación. Es fácil diseñar un chip súper eficiente capaz de hacer solo una tarea, pero ese tipo de producto se volverá obsoleto rápidamente.
El chip de Sze se llama Eyeriss. Desarrollado en colaboración con el científico investigador de Nvidia y profesor del MIT, Joel Emer, fue probado junto con varios procesadores estándar para ver cómo manejaba diferentes algoritmos de aprendizaje profundo. Equilibrando la eficiencia con la flexibilidad, el rendimiento del nuevo chip alcanza resulta entre 10 e incluso 1.000 veces más eficiente que el hardware existente, según un artículo publicado el año pasado.

Foto: Los investigadores del MIT Sertac Karaman y Vivienne Sze desarrollaron el nuevo chip.
Los chips de IA más simples ya están generando un gran impacto. Los teléfonos inteligentes de gama alta ya incluyen chips optimizados para ejecutar algoritmos de aprendizaje profundo para el reconocimiento de imagen y voz. Los chips más eficientes podrían permitir que estos dispositivos ejecuten un código de IA más potente con mejores capacidades. Los coches autónomos también necesitan poderosos chips de IA, ya que la mayoría de los prototipos dependen actualmente de un montón de ordenadores dentro del maletero.
Rao sostiene que los chips del MIT parecen prometedores, pero son muchos los factores que determinarán si una nueva arquitectura de hardware tendrá éxito. Uno de los más importantes, según él, es el desarrollo de software que permita a los programadores ejecutar código en él. «Hacer algo útil para aquellos que lo elaboran es probablemente el mayor obstáculo para la adopción», explica.
De hecho, el laboratorio de Sze también explora formas de diseñar software para explotar mejor las propiedades de los chips informáticos existentes. Y este trabajo se extiende más allá del aprendizaje profundo. Junto con el investigador del Departamento de Aeronáutica y Astronáutica del MIT Sertac Karaman, Sze desarrolló un chip de bajo consumo llamado Navion que realiza mapas en 3D y navegación de manera increíblemente eficiente, lo que permite integrarlo en un pequeño dron. Para este esfuerzo fue crucial diseñar un chip capaz de explotar el comportamiento de los algoritmos de navegación y crear un algoritmo que puediera aprovechar al máximo este chip personalizado. Junto al desarrollo del aprendizaje profundo, Navion refleja la forma en la que el software y el hardware de IA empiezan a evolucionar en simbiosis.
Los chips de Sze quizás no son tan llamativos como un dron con alas, pero el hecho de que fueran presentados en MARS refleja lo importante que será su tecnología, y la innovación del silicio en general, para el futuro de la IA. Después de su presentación, Sze afirma que algunos de los otros ponentes expresaron su interés en conocer más. «La gente encontró muchos casos importantes de aplicación», concluye. En otras palabras, podemos esperar que en la próxima conferencia de MARS los robots y drones lleven dentro algo bastante más especial.
Artículos relacionados:
■ Un robot que procura moverse tan bien como una hormiga
■ Chips de potencia ultra baja ayudan a hacer robots pequeños más capaces
■ Chip de cómputo basado en luz funciona similar a las neuronas