Los investigadores han desarrollado una mano biónica de nueva generación que permite a los amputados recuperar su propiocepción. Los resultados del estudio son la culminación de diez años de investigación en robótica.

El nuevo dispositivo permite a los pacientes alcanzar un objeto en una mesa y determinar la consistencia, la forma, la posición y el tamaño de un elemento sin tener que mirarlo.
La mano biónica de la próxima generación, desarrollada por investigadores de la EPFL, la Escuela de Estudios Avanzados Sant’Anna en Pisa y el Policlínico Universitario A. Gemelli en Roma, permite a los amputados recuperar un sentido del tacto muy sutil y casi natural. Los científicos lograron reproducir la sensación de propiocepción, que es la capacidad de nuestro cerebro para detectar al instante y con precisión la posición de nuestros miembros durante y después del movimiento, incluso en la oscuridad o con los ojos cerrados.
El nuevo dispositivo permite a los pacientes alcanzar un objeto en una mesa y determinar la consistencia, la forma, la posición y el tamaño de un elemento sin tener que mirarlo. La prótesis ha sido probada con éxito en varios pacientes y funciona estimulando los nervios en el muñón del amputado. Los nervios pueden proporcionar retroalimentación sensorial a los pacientes en tiempo real, casi como lo hacen en una mano natural.
Los hallazgos han sido publicados en la revista Science Robotics. Son el resultado de diez años de investigación científica coordinada por Silvestro Micera, profesor de bioingeniería en la EPFL y en la Escuela de Estudios Avanzados Sant’Anna, y Paolo Maria Rossini, director de neurociencia del Policlínico Universitario A. Gemelli en Roma.
Retroalimentación sensorial
Las prótesis mioeléctricas actuales permiten a los amputados recuperar el control motor voluntario de su extremidad artificial mediante la explotación de la función muscular residual en el antebrazo. Sin embargo, la falta de retroalimentación sensorial significa que los pacientes tienen que confiar mucho en las señales visuales. Esto puede evitar que sientan que su extremidad artificial es parte de su cuerpo y causa que su uso sea más antinatural.
Recientemente, varios grupos de investigación han logrado proporcionar retroalimentación táctil en personas con amputaciones, lo que ha llevado a una mejor función y realización de prótesis. Pero este último estudio ha llevado las cosas un paso más allá.
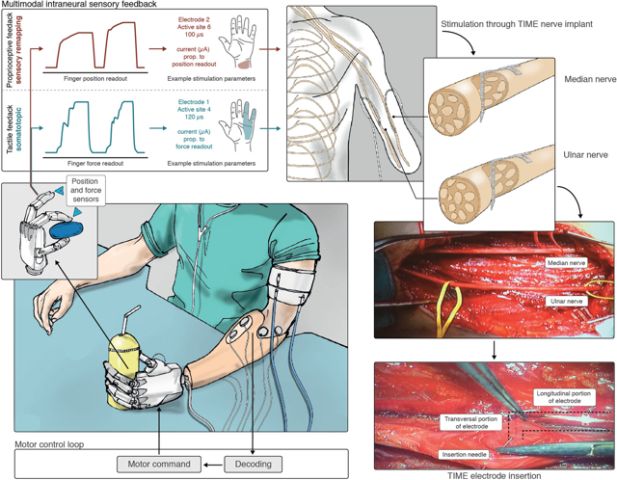
«Nuestro estudio muestra que la sustitución sensorial basada en la estimulación intraneural puede ofrecer tanto la retroalimentación de posición como la retroalimentación táctil de manera simultánea y en tiempo real», explica Micera. «El cerebro no tiene problemas para combinar esta información, y los pacientes pueden procesar ambos tipos en tiempo real con excelentes resultados».
La estimulación intraneural restablece el flujo de información externa mediante pulsos eléctricos enviados por electrodos insertados directamente en el muñón del paciente. Luego, los pacientes deben someterse a entrenamiento para aprender gradualmente a traducir esos pulsos en sensaciones propioceptivas y táctiles.
Esta técnica permitió a dos amputados recuperar una agudeza propioceptiva alta, con resultados comparables a los obtenidos en sujetos sanos. La entrega simultánea de información de posición y la retroalimentación táctil permitieron a los dos amputados determinar el tamaño y la forma de cuatro objetos con un alto nivel de precisión (75,5%).
«Estos resultados muestran que los amputados pueden procesar de manera efectiva la información táctil y de posición recibida simultáneamente a través de la estimulación intraneural», dice Edoardo D’Anna, investigador de EPFL y autor principal del estudio.
Fuente de la historia: Materiales proporcionados por Ecole Polytechnique Fédérale de Lausanne.
Referencia de publicación:
Edoardo D’Anna, Giacomo Valle, Alberto Mazzoni, Ivo Strauss, Francesco Iberite, Jérémy Patton, Francesco M. Petrini, Stanisa Raspopovic, Giuseppe Granata, Riccardo Di Iorio, Marco Controzzi, Christian Cipriani, Thomas Stieglitz, Paolo M. Rossini, Silvestro Micera. A closed-loop hand prosthesis with simultaneous intraneural tactile and position feedback (Una prótesis de mano de circuito cerrado con tacto intraneural simultáneo y retroalimentación de posición). Science Robotics, 2019; 4 (27): eaau8892 DOI: 10.1126/scirobotics.aau8892