Si un Tyrannosaurus Rex -que vivió hace 66 millones de años- presentaba una estructura de patas similar a la de un avestruz que hoy corre por la sabana, entonces podemos suponer que las patas de las aves resistieron la prueba del tiempo, lo que es un buen ejemplo de selección evolutiva.
Graciosas, elegantes, poderosas: la forma de caminar y correr de las aves no voladoras como el avestruz es una maravilla mecánica. Los avestruces, algunos de los cuales pesan más de 100 kg, corren por la sabana a una velocidad de hasta 55 km/h. Se cree que el excelente desempeño locomotor del avestruz es posible gracias a la estructura de las patas del animal. A diferencia de los humanos, cuando las aves doblan las patas hacia atrás levantan las patas hacia el cuerpo.
¿Por qué los animales hacen esto? ¿Por qué este patrón de movimiento del pie es energéticamente eficiente para caminar y correr? ¿Y se puede transferir la estructura de las patas del ave con todos sus huesos, músculos y tendones a robots caminadores?

Alexander Badri-Spröwitz ha dedicado más de cinco años a este tema. En el Instituto Max Planck para Sistemas Inteligentes (MPI-IS), dirige el https://dlg.is.mpg.de/ Grupo de Locomoción Dinámica. Su equipo trabaja en la interfaz entre biología y robótica en el campo de la biomecánica y el neurocontrol. El foco principal del grupo es la locomoción dinámica en animales y robots.
Junto con su estudiante de doctorado Alborz Aghamaleki Sarvestani, Badri-Spröwitz ha construido una pata de robot que, al igual que su modelo natural, es energéticamente eficiente: BirdBot necesita menos motores que otras máquinas y, en teoría, podría ser escalado a un gran tamaño. Badri-Spröwitz, Aghamaleki Sarvestani, el especialista en robótica Metin Sitti, director de MPI-IS, y la profesora de biología Monica A. Daley de la Universidad de California, Irvine, publicaron su investigación en la reconocida revista Science Robotics el 16 de marzo de 2022.
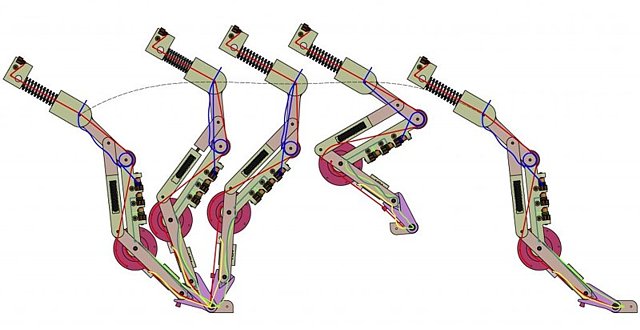
Al caminar, los humanos levantan los pies y doblan las rodillas, pero los pies y los dedos de los pies apuntan hacia delante, casi sin cambios de posición. Se sabe que los pájaros son diferentes: en la fase de balanceo, doblan las patas hacia atrás. Pero, ¿cuál es la función de este movimiento?
Badri-Spröwitz y su equipo atribuyen este movimiento a un acoplamiento mecánico. “No es el sistema nervioso, no son los impulsos eléctricos, no es la actividad muscular”, explica Badri-Spröwitz. “Presumimos una nueva función del acoplamiento pie-pata a través de una red de músculos y tendones que se extiende a través de múltiples articulaciones”. Estos músculos-tendón en varias articulaciones coordinan el giro de la pata en la fase de balanceo. En este robot, han implementado la mecánica acoplada en la pata y el pie, lo que permite que el robot camine de manera eficiente y robusta.
Los resultados de estas pruebas que demuestran el funcionamiento del mecanismo en un robot, llevan a creer que también para las aves similares se producen estos beneficios de eficiencia”, explica.
El acoplamiento de las articulaciones de las patas y los pies, y las fuerzas y movimientos involucrados, podrían ser la razón por la cual un animal grande como un avestruz no solo puede correr rápido, sino también estar de pie sin cansarse, especulan los investigadores. Una persona que pesa más de 100 kg también puede estar de pie bien durante mucho tiempo, pero solo con las rodillas ‘trabadas’ en una posición extendida. Si la persona se agacha un poco, se vuelve extenuante después de unos minutos. Al ave, sin embargo, no parece importarle la estructura de la articulación de sus patas; muchas aves incluso se paran erguidas mientras duermen.
La pata de un pájaro robótico debería poder hacer lo mismo: no debería ser necesaria la potencia de un motor para sostener la estructura en pie.
El robot camina en la caminadora
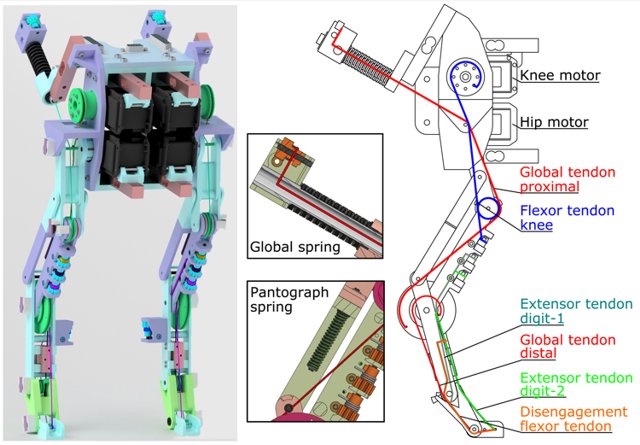
Para probar su hipótesis, los investigadores construyeron una pata robótica modelada a partir de la pata de un pájaro no volador. Construyeron su pata de pájaro artificial de tal modo que su pie no tiene motor, sino una articulación equipada con un mecanismo de resorte y cable. El pie se acopla mecánicamente al resto de articulaciones de la patas mediante cables y poleas.
Cada pata contiene solo dos motores: el motor de la articulación de la cadera, que balancea la pata hacia adelante y hacia atrás, y un pequeño motor que flexiona la articulación de la rodilla para levantar la pata.
Después del ensamblaje, los investigadores pusieron a BirdBot en una caminadora para observar cómo se plegaba y desplegaba el pie del robot.
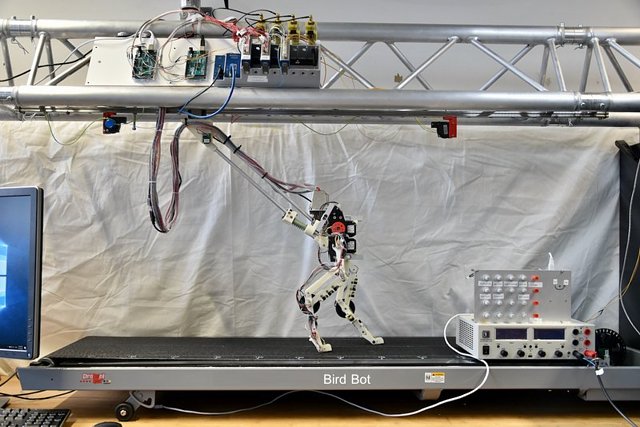
“Las articulaciones de los pies y las patas no necesitan activación en la fase de apoyo”, dice Aghamaleki Sarvestani. “Los resortes impulsan estas articulaciones, y el mecanismo de resorte-tendón en las múltiples articulaciones coordina los movimientos. Cuando la pata entra en la fase de balanceo, el pie desacopla el resorte de la pata, o resorte músculo-tendón, como creemos que sucede en los animales”, agrega Badri-Spröwitz. Un video AQUI muestra a BirdBot caminando en el laboratorio del grupo de investigación.
Cero esfuerzo al estar de pie y al flexionar la pata y la rodilla
Al estar de pie, la pata no gasta nada de energía. “Antes, nuestros robots tenían que trabajar extendiendo un resorte o con un motor, ya sea cuando estaban de pie o cuando levantaban la pata, para evitar que la pata chocara contra el suelo durante el balanceo de la pata. Este gasto de energía no es necesaria en las patas de BirdBot”, dice Badri-Spröwitz y Aghamaleki Sarvestani agrega: “En general, el nuevo robot requiere solo una cuarta parte de la energía de su predecesor”.
De nuevo en la cinta deslizante, el robot comienza a correr y, con cada movimiento de la pata, el pie afloja el resorte de la pata. Para levantarse, el movimiento amplio de la pata afloja el cable y las restantes articulaciones de la pata se balancean flojas. Esta transición de estados entre estar de pie y balancear las patas se logra en la mayoría de los robots por medio un motor en la articulación. Un sensor envía una señal a un controlador, que enciende y apaga los motores del robot.
“Antes, los motores se turnaban dependiendo de si la pata estaba en la fase de balanceo o de apoyo. Ahora el pie asume esta función en la máquina para caminar, cambiando mecánicamente entre el apoyo y el balanceo. Solo necesitamos un motor en la articulación de la cadera y un motor para doblar la rodilla en la fase de balanceo. Dejamos el enganche y desenganche del resorte de la patas a la mecánica inspirada en las aves. Esto es sólido, rápido y de bajo consumo, dice dice Badri-Spröwitz.
En varios de sus primeros estudios de biología, Monica Daley observó que la estructura de las patas del ave no solo ahorra energía al caminar y estar de pie, sino que también está adaptada por la naturaleza para que el animal difícilmente tropiece y se lastime. En experimentos con gallinas de Guinea corriendo sobre baches ocultos, cuantificó la notable robustez de locomoción de las aves.
El sistema tiene integrada una inteligencia morfológica que le permite al animal actuar con rapidez, sin tener que pensar en ello. Daley había demostrado que los animales controlan sus patas durante la locomoción no solo con la ayuda del sistema nervioso. Si un obstáculo inesperado se encuentra en el camino, no siempre es el sentido del tacto o la vista del animal el que entra en juego.
“La estructura con sus músculos-tendones de múltiples articulaciones, y su movimiento único del pie pueden explicar por qué hasta las aves grandes y pesadas corren tan rápido, con tanta fuerza y con un consumo energético eficiente. Asumiendo que todo en el ave se basa en la detección y la acción, y el animal pisa un obstáculo inesperado, no es posible que el animal pudiese reaccionar lo suficientemente rápido. La percepción y la detección, incluso la transmisión de los estímulos y la reacción, llevan tiempo”, dice Daley.
Sin embargo, el trabajo de 20 años de Daley sobre pájaros en movimiento demuestra que los pájaros responden más rápido de lo que permite el sistema nervioso, lo que indica que en el control existen contribuciones mecánicas. Ahora que el equipo desarrolló BirdBot, un modelo físico que demuestra directamente cómo funcionan estos mecanismos, todo tiene más sentido: la pata se adapta mecánicamente si hay un bache en el suelo. El cambio ocurre de inmediato y sin demora. Al igual que las aves, el robot presenta una gran robustez de locomoción.
Ya sea en la escala de un Tyrannosaurus Rex, o una pequeña codorniz. O una pata robótica pequeña o grande, teóricamente ahora se pueden implementar patas de un metro de altura para transportar robots con un peso de varias toneladas y que caminen con poca energía.
La información adquirida a través de BirdBot en el desarrollo realizado en Dynamic Locomotion Group y la Universidad de California, Irvine, nos lleva a un nuevo conocimiento sobre los animales, que se adaptan a la evolución. Los robots permiten poner a prueba la hipótesis de la Biología, y en ocasiones confirmarlas, y así avanzar en ambos campos.
Artículo original: BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching. Alexander Badri-Spröwitz, Alborz Aghamaleki Sarvestani, Metin Sitti y Monica A. Daley. Science Robotics, Vol 7, Issue 64. DOI: 10.1126/scirobotics.abg4055